
A mesterséges intelligencia elfogult a konzervatívokkal szemben

Európa lemarad a mesterséges intelligenciáért való versenyben, de a hagyományos tudás oktatására továbbra is szükség van – vallja Edoardo Rafiotta olasz jogászprofesszor.
Két mélytanulással működő új technika segíti a gépeket közlekedési képek, azaz utak és személyek elemzésében. Látni tanulnak. Jelentős mértékben javíthatják vezető nélküli járművek, okostelefonok és kamerák teljesítményét.
A Cambridge Egyetemen fejlesztett rendszerek felismerik saját és környezetük térbeli elhelyezkedését. A legtöbb vezető nélküli autó radart és LIDAR érzékelőket használ, amelyek szépséghibája, hogy gyakran drágábbak, mint maga a jármű. A két új rendszer viszont nem.
Egyikük, a SegNet közönséges kamerával vagy okostelefonnal valós időben azonosítja a felhasználó helyzetét, az irányt, az úton történtek sok elemét, és olyan helyeken is működik, ahol a GPS nem (alagút, belső terek stb.). Rögzít, majd 12 különféle kategória (utak, útjelző táblák, gyalogosok, épületek, kerékpárosok stb.) alapján osztályoz képeket.
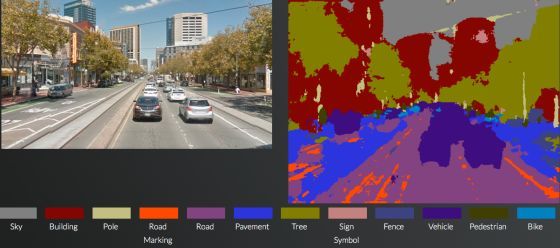
Kezeli a fényt, árnyékot, éjszakai környezeteket, a pixelek 90 százalékát pontosan címkézi. Korábbi rendszerek drága lézer- vagy radaralapú szenzorai valós időben nem érték el ezt a szintet.
Fejlesztéséhez 5 ezer kép minden egyes pixelét manuálisan címkézték fel. Egy kép 30 percig tartott. A címkézést követően városi utakon és autópályákon is gyakoroltatták. Sikerrel járt, de még akad rajta javítanivaló: például vidéki, havas és kihalt közegben is le kell tesztelni. Egyelőre nincs azon a szinten, hogy autót vagy teherautót irányítson, figyelmeztetőrendszernek viszont kiváló.
Nem volt egyszerű betanítani.
„Három technológiai kulcskérdésre kell válaszolni autonóm járművek tervezésekor: hol vagyok, mi van körülöttem és mi lesz a következő lépésem?” – magyarázza a projektet vezető Roberto Cipolla.
A SegNet a második kérdést igyekszik megválaszolni. A kutatók szintén mélytanulást használó Vizuális Lokalizáció rendszere pedig az elsőt: zsúfolt nagyvárosi jelenet egyetlen színes képe alapján képes rá. Egy kilométeres útszakaszon tesztelték Cambridge-ben, és a GPS-eknél pontosabb munkát végzett.
„Rövidtávon inkább robotoknál, például porszívóhoz fogják használni a technológiát. Autonóm járművekhez idő kell még. Minél hatékonyabb és pontosabb lesz, annál hamarabb terjed el széles körben” – prognosztizál Cipolla.
Európa lemarad a mesterséges intelligenciáért való versenyben, de a hagyományos tudás oktatására továbbra is szükség van – vallja Edoardo Rafiotta olasz jogászprofesszor.

A biztonsági félelmek ellenére is nő a TikTok használatának népszerűsége az európai politikusok körében.

Merész döntés született egy francia faluban lebonyolított népszavazáson: csupán pár szavazattal, de betiltották az okostelefonok használatát a közterületükön. A lakóknak abból lett elegük, hogy egyesek naphosszat rá vannak tapadva a kis képernyőre. De vajon fel lehet-e venni a harcot ily módon a szinte mindenkinél kézben lévő eszközökkel?

A politikusokat is utolérte a deepfake videók ijesztő világa.

Washingtonnak nem tetszik a cég monopóliuma.

Ez az egész inkább a kameráknak szólt, nem értem mi másért jöttek volna.

„A tét az életünk, a tét a béke” – szögezte le az országgyűlési képviselő.

Ami számos alkalommal teljesült is.











