
Isten nyugtassa, Mester!
Jó eséllyel úgy vélné, túl sok minden nem változott, csak kevesebb helyen lehet sétálni, és több helyen biliárdozni.
A robotika napjaink egyik legizgalmasabb és leglátványosabb gépészeti és informatikai szakterülete, a mindenkori mesterségesintelligencia-kutatás zászlóshajója és bemutatóműhelye. Milyen fejlődési szakaszokon mentek át a robotok, hogyan jutnak el a buta első generációtól a fejlett negyedikig, és egyszer azon túl is?
Bár a szükséges tudás, legalábbis elméletileg többé-kevésbé rendelkezésre áll, a mai robotok szinte egyike sem mérhető – különösen az érzékelők kezelése, az energiafelhasználás, valamint a tanulóképesség tekintetében – a legegyszerűbb élő autonóm állathoz sem. A fejlesztéseket nehezíti, hogy a számítógépek képességei között még mindig éppen a tanuló adaptív működés a legelmaradottabb, bár az utóbbi két-három esztendőben, és amióta általánosságban mesterségesintelligencia-reneszánszról beszélhetünk, pont ezen a területen tapasztaltuk a legdinamikusabb fejlődést.
Hogyan jutott el idáig a robotika, mik jellemzik az eddigi generációkat, miben jelenthet újat a következő, a negyedik?
Első generáció
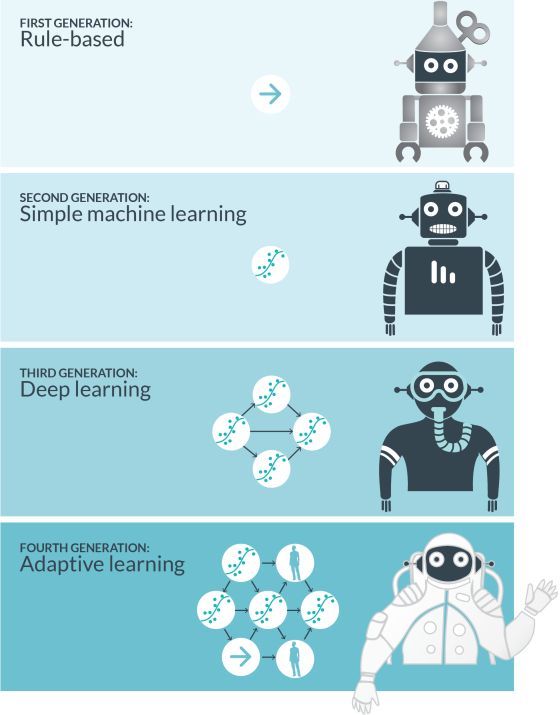
Az eddigi robotfejlesztések három generációban foglalhatók össze.
Az első generációsok kizárólag vezérléssel működtethetők, a számítógép programja adja meg mozgásuk útvonalát, határozza meg az elvégzendő tevékenységeket. Nem érzékelik a környezet változásait.

Leginkább a szakterület „zsenge gyermekkorától” jelen lévő egyszerű robotkarok ők. Jellemzően pontos és gyors mozdulatokra, többször és hosszú ideig képesek. Nem véletlen, hogy az ipari alkalmazások nagy része ezeket a gépeket jelenti.
Ha cselekedeteik összehangoltak, csoportban, például automatizált integrált gyártórendszerekként is dolgozhatnak. Tevékenységükre viszont folyamatosan oda kell figyelni, alkalmasint változtatások is szükségesek. Ha a legapróbb hibánál nem állítják le őket, és folytatják a munkát, csomó selejttermék lehet a következmény.
Második generáció
Az 1980 körül megjelent második generációsok kezdetleges gépi intelligenciával rendelkeznek. Környezetüket szenzorokkal (nyomás-, tapintás-, hang-, távolságérzékelőkkel), radarral, látórendszerrel vizsgálják, az így szerzett és a saját működésükről nyert információk alapján a számítógép bármikor képes módosítani a robot mozgását, például kikerüli a váratlanul útjába kerülő akadályokat. Feladataikat magas szintű programnyelven határozzák meg.

Ezek a robotok folyamatos emberi felülvizsgálat és korrekció nélkül is képesek egymással szinkronban tevékenykedni, időszaki ellenőrzésre azonban – mint minden gépnél, így az ő esetükben is – szükség van. Már csak azért is, mert minél összetettebb egy rendszer, annál többféleképpen hibázhat.
Harmadik generáció
A jelenleg általában kutatási alkalmazásokban, de már „élesben” is megtalálható harmadik generációnál egyértelmű a mesterséges intelligencia térhódítása: jól alkalmazkodnak a környezet változásaihoz, alakokat és helyzeteket ismernek fel, hanggal is vezérelhetők, amire képesek hanggal válaszolni, önálló döntéseket hoznak, bonyolult feladatokat oldanak meg, alkalom adtán maguktól módosítják a betáplált programot.
Segítségükre vannak tanuló algoritmusaik; általuk hasznosítják korábbi tapasztalataikat. Sokféle cselekvést képesek emberi vagy külső számítógépes felügyelet, irányítás nélkül végrehajtani.

Az „okos” technológiák főként két csoportját képviselik: az autonóm és a rovarrobotokat. Közéjük tartozik sokak álma, a személyi robot is.
Az autonóm robotok egyes helyzeteket viszont nem tudnak hatékonyan kezelni. Ilyenkor tanácsosabb egyetlen központi számítógép vezérelte „rovarközösségeket” – a rajintelligenciából és az ágenskutatásból ismert mesterséges hangyákat, termeszeket, méheket – használni. Az egyedeknek ugyan nincs mesterséges intelligenciájuk, az általuk formált csoport viszont sokkal többre és a tagok viselkedéséből nem eredeztethető viselkedésekre is képesek.
A hagyományos ipari és az autonóm mobil robotok közötti különbséget jól szemlélteti, hogy az előbbiek, például a robotkarok csak első és második, az utóbbiak viszont egyelőre inkább második és – tömeges használatra még nem alkalmas – harmadik generációsok. A várható fejlődés eredményeként, a hagyományos ipari alkalmazásokat leszámítva, előbb-utóbb döntő többségben harmadik generációsokat fejlesztenek, és megalapoznak egy negyediket is.
Negyedik generáció
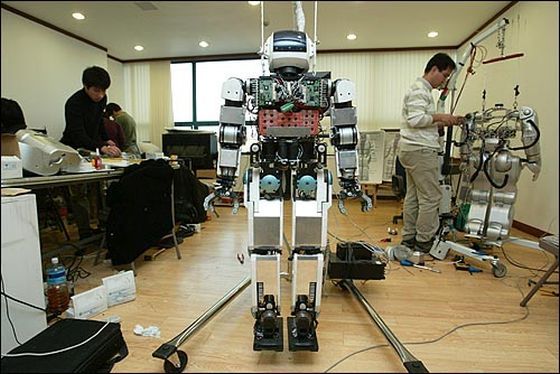
Negyedik generációs robotok egyelőre inkább elméletben, tervezőasztalokon és laboratóriumok kezdeti fejlesztői stádiumában leledznek. Komplex feladatokat autonóm módon hajtanak végre, fejlődnek és képesek reprodukálni magukat. Biológiai és mechanikus részeket egyaránt tartalmazhatnak.
Az utánuk jövő ötödik generációról ugyan már beszélnek szakmai berkekben, de senki nem tervezi még őket, és a róluk alkotott elképzelések is felettébb homályosak.
Jó eséllyel úgy vélné, túl sok minden nem változott, csak kevesebb helyen lehet sétálni, és több helyen biliárdozni.

Kell-e félnünk a mesterséges intelligenciától? Mi, emberek rendelkezünk-e felette? Elveheti-e a munkánkat? Milyen etikai kérdések merülnek fel az MI kapcsán? – szakértőt kérdeztünk.

Az ukrajnai harcok és a gázai konfliktus az emberiség történetében az első olyan háború, amelyben a mesterséges intelligencia által irányított fegyverek jelentős szerepet kapnak. A hadviselésben valami új kezdődött, semmi sem lesz már úgy, mint régen. A gépek vezérelte harcra – ami, ha lehet, még az eddigieknél is könyörtelenebb – a tudósok hiába figyelmeztettek: a gyilkos robotoknak az ember nem tud ellenállni.

Európa lemarad a mesterséges intelligenciáért való versenyben, de a hagyományos tudás oktatására továbbra is szükség van – vallja Edoardo Rafiotta olasz jogászprofesszor.

A mesterséges intelligencia rengeteg egyéb felhasználási területe mellett forradalmasította az élelmiszer-termelés, -forgalmazás és -fogyasztás módját is.

Az indulásnál egy szabály van, mégpedig, hogy a versenyzőknek teljesen mesterséges intelligencia által generáltnak kell lenniük.

A francia elnök szerint meg kell vizsgálni, hogy milyen megoldások adhatnak valódi védelmet a kontinensnek.

Az MCC főigazgatója szerint a vita megszűnése rossz hatással lesz a tudományra, a gondolkodásra és az intellektuális fejlődésre is.











