
Medgyessy megfejtette, s leszögezte: ekkor fog megbukni Orbán Viktor (VIDEÓ)

Belföld
Egy közeli évet jelölt meg a volt miniszterelnök, aki Magyar Péterről is elmondta a véleményét.
A robotot meglökjük, mire a robot visszalök – valódi érintést érzünk a virtuális világban.
A tapintásalapú (haptikus) technológiák virtuális valóságbeli használata gyerekcipőben jár még. Scott Devine, a belfasti Queen’s Egyetem PhD-hallgatója a hagyományos módszerektől eltérő megoldást talált ki: a 25 ezer dolláros ipari Baxter robottal valós életbeli (IRL) helyzeteket próbál utánozni a HTC Vive VR-jében.
Például, ha egy fadobozzal érintkezik a szimulációban, a robot karját a legjobb pozícióba mozgatja, az ott tartózkodó személy optimális ellenállással találkozik, amikor odébb tolja a dobozt. Sokkal életszerűbb, immerzívebb az élmény.
A találkozáson alapuló tapintórendszer lényege, hogy az eszközt nem rögzítik az adott személyre, hanem pár milliméterről követi az illető kezét. Közben az ütközésre vár, ami jelen esetben az erő érzetét kelti.
Az átlagfelhasználóknak túl drága rendszer egyelőre csak megvalósíthatósági példa, a kísérlet viszont mindenképpen érdekes. A robotot meglökjük, a robot visszalök, amit valódinak érzünk.
Egy közeli évet jelölt meg a volt miniszterelnök, aki Magyar Péterről is elmondta a véleményét.
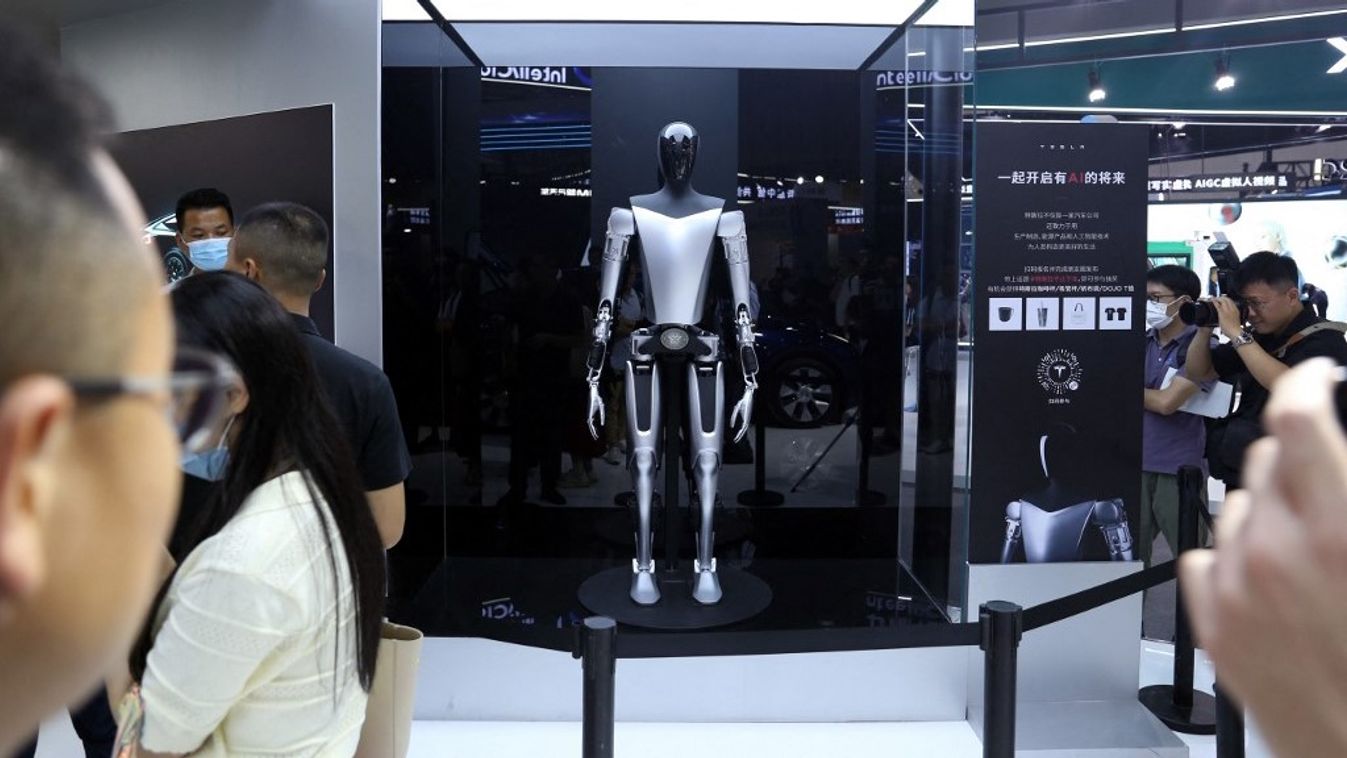
A Tesla Optimus nevű robotja az év végére képes lesz a gyárban végzett feladatok elvégzésére.

Valljuk be: ezzel nem szívesen találkozna az ember.

Csodával határos módon könnyebb sérülésekkel megúszta.

Az ukrajnai harcok és a gázai konfliktus az emberiség történetében az első olyan háború, amelyben a mesterséges intelligencia által irányított fegyverek jelentős szerepet kapnak. A hadviselésben valami új kezdődött, semmi sem lesz már úgy, mint régen. A gépek vezérelte harcra – ami, ha lehet, még az eddigieknél is könyörtelenebb – a tudósok hiába figyelmeztettek: a gyilkos robotoknak az ember nem tud ellenállni.

Európa lemarad a mesterséges intelligenciáért való versenyben, de a hagyományos tudás oktatására továbbra is szükség van – vallja Edoardo Rafiotta olasz jogászprofesszor.

Bármikor elárulnak bárkit, de leginkább a sajátjaikat.

2024-ben eddig közel 7000 illegális bevándorlót fogtak el a francia tengerpartokon.











